 How to do gain calibration
How to do gain calibrationCalibration can significantly improve the accuracy of the measurements. Analyze supports 3 levels of calibration:
This method only compensates for differences of the left and right channel of the sound device. In most cases that adds no much value since most sound devices have no significant differences here. Therefore this method is not recommended unless you want to compensate for additional external components.
This calibration compensates for cross talk. While cross talk is no serious issue in most sound devices it might be considerably in measurement setups. If your setup has a stable reference signal, i.e. independent of the measurement sample load and you do not use a 4 point probe, than this kind of calibration is usually sufficient. This applies typically to two port measurements of transfer functions with an very low output impedance amplifier as source, e.g. an audio amplifier.
This compensates for all relevant linear deviations of the measurement setup. Strictly speaking there is a
forth degree of freedom in the matrix, but since absolute amplitudes do not count in all supported measurement modes there
is no need for a full calibration.
Three point calibration is recommended for impedance measurements with 4 point probes.
All kinds of calibrations are frequency dependent and complex, i.e. compensate for amplitude and phase of each frequency.
The simple gain calibration mode only takes care of the differences in the transfer function between the two input channels. This is sufficient to compensate for tolerances and phase differences between the channels. This is particularly important in differential mode.
Note that the gain calibration does not compensate for the absolute transfer function of the sound device in any way. It does not even distinguish between the transfer function of the line output stage and the transfer function of the line input.
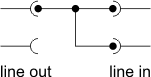
How to do gain calibrationConnect both line in channels to one line out channel. Play a white noise and activate the gain correction mode with option gg.
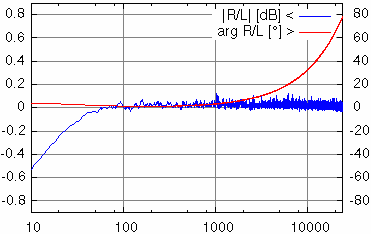
The result of the gain calibration is the complex and frequency dependent quotient:
The magnitude of this quotient is a measure of the degree of gain difference between the two channels. A typical value is mainly independent of the frequency and close to but not exactly one. This is due to tolerances in resistors. At low frequencies the difference may increase due to tolerances in the coupling capacitors.
The phase angle of the correction shows the synchronization of the channels. Beyond the small differences due to tolerance of the coupling capacitors there are usually no particular deviations. But some sound devices sample the two channels not simultaneously but alternating. In this case there is a linear phase shift.
When using the correction is used with option gr it is applied to both channels symmetrically.
Do not use this correction to compensate for a complex transition function or there will be an impact on automatic weight function.
The simple gain calibration method above does not compensate for cross talk. So there is a superior calibration method called matrix calibration. It should be preferred at least for impedance measurements.
Using and (L = channel 1, R = channel 2) the real impedance is:
But in fact you can't see Lideal and Rideal. What you really record is Lreal and Rreal, a transformation:
Of course, all the coefficients cxx are complex and frequency dependent.
The matrix correction is applied to the measurement data with option zr. This calculates the inverse transformation matrix and applies it to the input data before the data is passed to the FFT analysis.
The sampling rate and the FFT size of the matrix correction data do not need to match the values of the current measurement. A linear interpolation is used in doubt. But it is recommended to match the sampling rate matches because sound devices tend to have sampling rate dependent filtering and the interpolation is very simple.
The easiest way to get the calibration coefficients is a two point calibration. This mode is activated by the zg zn options.
It basically does
This is, of course, not sufficient to get four coefficients. So further assumptions are needed. The main assumption is that the sum of Lreal + Rreal is the same for both calibration measurements, i.e. the reference is the same.
While this is typically a good assumption for two port measurements it might be a bad one for impedance measurements due to wire inductance.
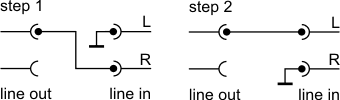
The first calibration is done with the reference signal only connected to channel 2 (R) and channel 1 (L) grounded. The second calibration is done the other way around.
If you use additional preamplifiers you should put the ground to their input instead of the sound devices input to compensate for their properties as well.
When the matrix calibration is initiated with option zg, analyze takes the following steps in sequence:
It is essential to use absolutely the same reference signal in both steps. The reference therefore must be exactly reproducible. So it cannot be done with white noise but must by cyclic. This implies to use the same output channel of the sound device, too. It is also essential the the phase of the reference signal is 100% correlated in both steps. This is the reason why both measurements have to be done at one single run without closing the sound device in between. The synchronization of the input (ADC) and the output (DAC) have to be stable within less than one sample over the whole measurement. This is only possible if both are controlled by the same crystal oscillator. Fortunately this is naturally ensured as long as both ports are on the same sound device.
In theory the matrix correction omits all linear errors without the need of an absolute reference. Practically this only works for the correction of sound device itself. For impedance measurements there is one degree of freedom to much. You know neither Rideal at Z = 0 nor Lideal at Z = ∞ and they are not necessarily the same. You could eliminate the additional degree of freedom if you assume that Uref ∝ Lideal + Rideal => Rideal at Z = 0 equals Lideal at Z = ∞ (see option zn). But this introduces the systematic error that the high current at Z = 0 causes an additional voltage drop at inductance of the wires.
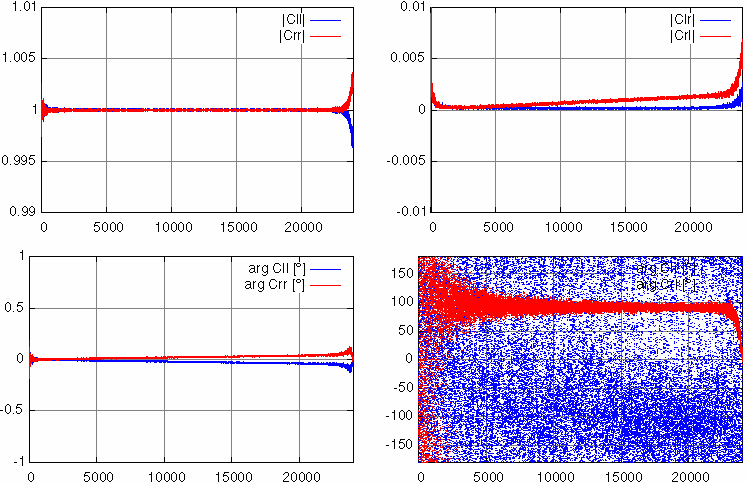 Example of matrix calibration result: on board Realtek ALC650 codec at 48 kHz sampling rate and a self-made probe with 200Ω Rref and an
FFT length of 65536 samples, averaged over 10 cycles.
Example of matrix calibration result: on board Realtek ALC650 codec at 48 kHz sampling rate and a self-made probe with 200Ω Rref and an
FFT length of 65536 samples, averaged over 10 cycles.Three point calibration is primarily intended for impedance measurements, but it may be used for two port measurements as well. It will use a third calibration measurement with a known impedance (or a known transfer function respectively). This compensates for all linear deviations.
When the 3 point matrix calibration is initiated with option zg, analyze takes the following steps in sequence:
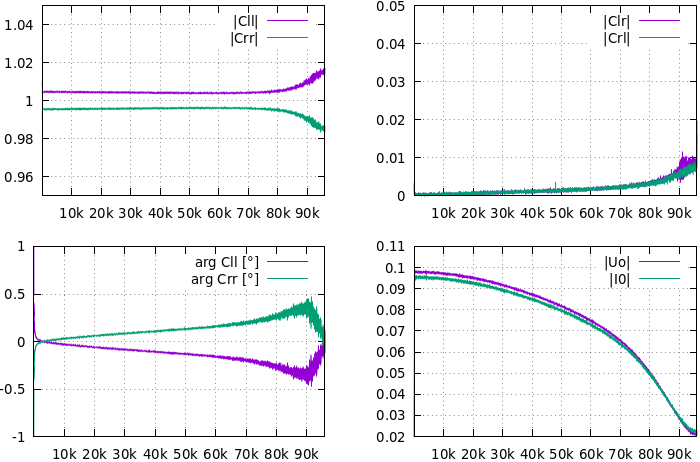 Example of 3 point
matrix calibration of on-board Intel HDA device with 192 kHz sampling rate and a self-made
probe with 20 Ω reference resistor.
Example of 3 point
matrix calibration of on-board Intel HDA device with 192 kHz sampling rate and a self-made
probe with 20 Ω reference resistor.